Kicking Off the Pixel8.earth Ambassador Program
We’ve been chomping at the bit to open up Pixel8earth to the public. The challenge in launching a platform so computationally intensive is being able to stress test the infrastructure. To that end we’ve created an ambassador program where we will send 360 degree GoPro cameras to a dozen plus interested mappers to collect imagery of their city/town. Once your video is uploaded to Pixel8.earth we’ll generate 3D point clouds and soon 3D meshes as well. The resulting 3D data will be available for public download by anyone free of charge and under an open data license. Once we get all the bugs identified and the scaling nailed we’ll open up the platform to the general public. If you’d like to be an ambassador please fill out this form.
Ambassador Selection
We’ll be basing the selection of ambassadors on a variety of factors outlined below:
- Geographic Diversity — we want to have mappers from a variety of locations and backgrounds. The goal is to map the globe in 3D and we want to test the platform in a several locations.
- Relevant experience — ideally ambassadors will have some previous experience with mapping, videography or photogrammetry work.
- Reference availability — to establish ground truth and create spatially accurate 3D models we use open reference data like aerial LiDAR. While we want to test a few areas that have no reference we will have a bias towards locations where reference is available.
- Camera availability — if you already have a 360 camera that we support it increases the odds of being selected.
Transparency
We firmly believe in the economic maxim that “there is no free lunch”. Running big compute clusters to support converting videos/photos into a global 3D model isn’t cheap and cost will inevitably add up. We’d like to not just leave to hope we figure out a business model down the road.
The approach we’ll use to make Pixel8.earth economically viable is “maps for humans are free” and “maps for machines are for fee”. When we generate a 3D model using photogrammetry there are two data sets created. One data set is the visual 3D point cloud or mesh generated from the video/photo stream. Like this model of an urban intersection.

These 3D “maps for humans” will be free as long as you are good to go with an open data license for your contribution. The “maps for humans” can be used for commercial applications and won’t have a viral license encumbering remixing or derivative works. We are working through the best license for the community and if you have thoughts please share them with us.
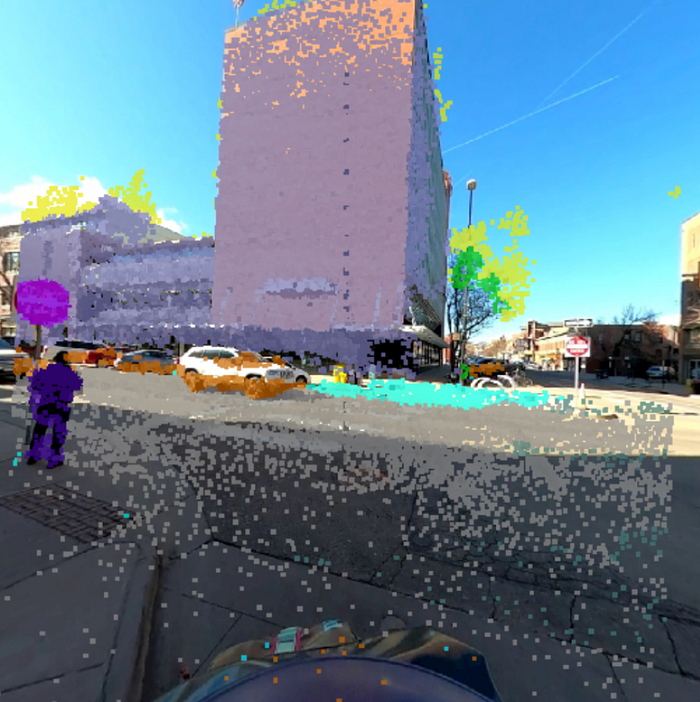
To support this “free” service we will also be providing a “for fee” service. “Maps for machines” takes the form of feature databases that allow machines to localize themselves to navigate a 3D world. Today feature database are primarily used for augmented reality and autonomy. Features are the unique pixels in a photo that can be used to associate other photo’s pixels of the same object to generate a 3D reconstruction. For example, here are the features for a photo of downtown Boulder.

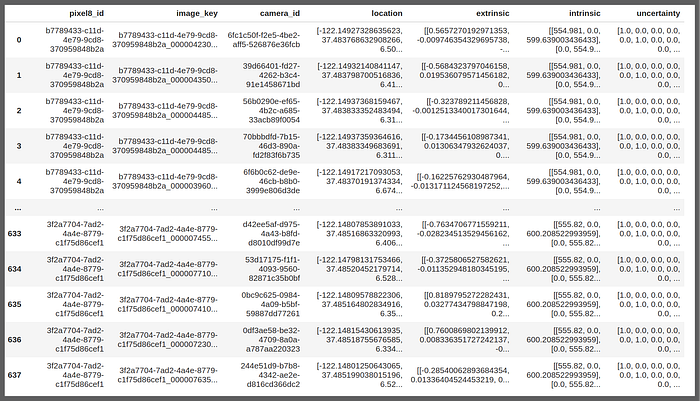
The features from multiple photos that are used to create a 3D reconstruction are stored in a feature database that looks like this in practice:
Privacy
One of the positive externalities we like about this approach is the programmatic privacy it creates. The photogrammetric process inherently removes non-stationary objects like people. Further, semantic segmentation of input data can remove people and cars from the photogrammetric process entirely.
Both of these are capabilities we take advantage of to anonymize data. In addition the visual “maps for humans” will be open, which will allow us to work with the community to identify any future privacy challenges that might arise.
“Maps for machines” feature databases are focused on localizing images using unique identifiers from the built environment. Since we are focused on outdoor use cases that are publicly accessible these features are by default objects that are typically in the public domain. People, bikes, cars etc. are transitory and not part of the built environment. So, not only do we not want them in the database for privacy reason they also make for bad data. This makes for a well aligned incentive structure. What is best for privacy is also best for good results. That all said augmented reality and autonomy are just emerging and we are still learning what all the potential privacy concerns will be. Pixel8.earth is committed to prioritizing privacy. We believe a focus on mapping the built environment will ensure that data about people and their privacy will never be the product. We look forward to seeing what the community can do with an open 3D map of the globe, and hope it is a project you’ll want to participate in. If you’d like to be an ambassador please apply here.
